In this chapter, the kinematics of rigid bodies will be considered. You will investigate the relations existing between the time, the positions, the velocities, and the accelerations of the various particles forming a rigid body. As you will see, the various types of rigid-body motion can be conveniently grouped as follows:
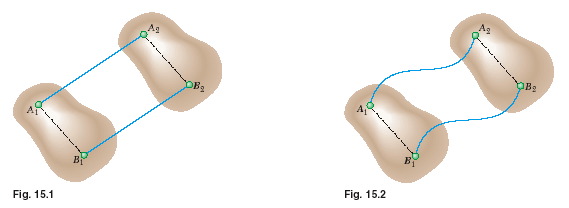
- Translation. A motion is said to be a translation if any straight line inside the body keeps the same direction during the motion. It can also be observed that in a translation all the particles forming the body move along parallel paths. If these paths are straight lines, the motion is said to be a rectilinear translation (Fig. 15.1); if the paths are curved lines, the motion is a curvilinear translation (Fig. 15.2).
 <a onClick="window.open('/olcweb/cgi/pluginpop.cgi?it=jpg:: ::/sites/dl/free/007230491x/60488/chap15figA.jpg','popWin', 'width=619,height=278,resizable,scrollbars');" href="#"><img valign="absmiddle" height="16" width="16" border="0" src="/olcweb/styles/shared/linkicons/image.gif"> (22.0K)</a> <a onClick="window.open('/olcweb/cgi/pluginpop.cgi?it=jpg:: ::/sites/dl/free/007230491x/60488/chap15figA.jpg','popWin', 'width=619,height=278,resizable,scrollbars');" href="#"><img valign="absmiddle" height="16" width="16" border="0" src="/olcweb/styles/shared/linkicons/image.gif"> (22.0K)</a>
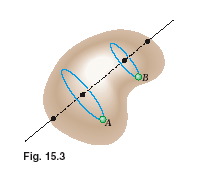
| - Rotation about a Fixed Axis. In this motion, the particles forming the rigid body move in parallel planes along circles centered on the same fixed axis (Fig. 15.3). If this axis, called the axis of rotation, intersects the rigid body, the particles located on the axis have zero velocity and zero acceleration.
Rotation should not be confused with certain types of curvilinear translation. For example, the plate shown in Fig. 15.4a is in curvilinear translation, with all its particles moving along parallel circles, while the plate shown in Fig. 15.4b is in rotation, with all its particles moving along concentric circles. In the first case, any given straight line drawn on the plate will maintain the same direction, whereas in the second case, point O remains fixed.
Because each particle moves in a given plane, the rotation of a body about a fixed axis is said to be a plane motion.
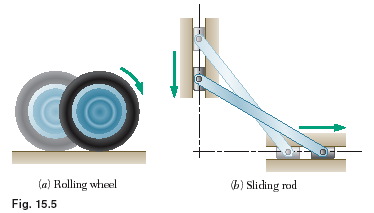
|  <a onClick="window.open('/olcweb/cgi/pluginpop.cgi?it=jpg:: ::/sites/dl/free/007230491x/60488/chap15figB.jpg','popWin', 'width=250,height=248,resizable,scrollbars');" href="#"><img valign="absmiddle" height="16" width="16" border="0" src="/olcweb/styles/shared/linkicons/image.gif"> (8.0K)</a> <a onClick="window.open('/olcweb/cgi/pluginpop.cgi?it=jpg:: ::/sites/dl/free/007230491x/60488/chap15figB.jpg','popWin', 'width=250,height=248,resizable,scrollbars');" href="#"><img valign="absmiddle" height="16" width="16" border="0" src="/olcweb/styles/shared/linkicons/image.gif"> (8.0K)</a> | 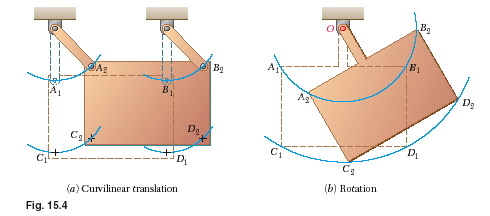 <a onClick="window.open('/olcweb/cgi/pluginpop.cgi?it=jpg:: ::/sites/dl/free/007230491x/60488/chap15figC.jpg','popWin', 'width=540,height=286,resizable,scrollbars');" href="#"><img valign="absmiddle" height="16" width="16" border="0" src="/olcweb/styles/shared/linkicons/image.gif"> (29.0K)</a> <a onClick="window.open('/olcweb/cgi/pluginpop.cgi?it=jpg:: ::/sites/dl/free/007230491x/60488/chap15figC.jpg','popWin', 'width=540,height=286,resizable,scrollbars');" href="#"><img valign="absmiddle" height="16" width="16" border="0" src="/olcweb/styles/shared/linkicons/image.gif"> (29.0K)</a> | - General Plane Motion. There are many other types of plane motion, that is, motions in which all the particles of the body move in parallel planes. Any plane motion which is neither a rotation nor a translation is referred to as a general plane motion. Two examples of general plane motion are given in Fig. 15.5.
- Motion about a Fixed Point. The three-dimensional motion of a rigid body attached at a fixed point O, for example, the motion of a top on a rough floor (Fig. 15.6), is known as motion about a fixed point.
|  <a onClick="window.open('/olcweb/cgi/pluginpop.cgi?it=jpg:: ::/sites/dl/free/007230491x/60488/chap15figD.jpg','popWin', 'width=424,height=283,resizable,scrollbars');" href="#"><img valign="absmiddle" height="16" width="16" border="0" src="/olcweb/styles/shared/linkicons/image.gif"> (18.0K)</a> <a onClick="window.open('/olcweb/cgi/pluginpop.cgi?it=jpg:: ::/sites/dl/free/007230491x/60488/chap15figD.jpg','popWin', 'width=424,height=283,resizable,scrollbars');" href="#"><img valign="absmiddle" height="16" width="16" border="0" src="/olcweb/styles/shared/linkicons/image.gif"> (18.0K)</a> |  <a onClick="window.open('/olcweb/cgi/pluginpop.cgi?it=jpg:: ::/sites/dl/free/007230491x/60488/chap15figE.jpg','popWin', 'width=259,height=254,resizable,scrollbars');" href="#"><img valign="absmiddle" height="16" width="16" border="0" src="/olcweb/styles/shared/linkicons/image.gif"> (6.0K)</a> <a onClick="window.open('/olcweb/cgi/pluginpop.cgi?it=jpg:: ::/sites/dl/free/007230491x/60488/chap15figE.jpg','popWin', 'width=259,height=254,resizable,scrollbars');" href="#"><img valign="absmiddle" height="16" width="16" border="0" src="/olcweb/styles/shared/linkicons/image.gif"> (6.0K)</a> | - General Motion. Any motion of a rigid body which does not fall in any of the categories above is referred to as a general motion.
|
After a brief discussion in Sec. 15.2 of the motion of translation, the rotation of a rigid body about a fixed axis is considered in Sec. 15.3. The angular velocity and the angular acceleration of a rigid body about a fixed axis will be defined, and you will learn to express the velocity and the acceleration of a given point of the body in terms of its position vector and the angular velocity and angular acceleration of the body.
The following sections are devoted to the study of the general plane motion of a rigid body and to its application to the analysis of mechanisms such as gears, connecting rods, and pin-connected linkages. Resolving the plane motion of a slab into a translation and a rotation (Secs. 15.5 and 15.6), we will then express the velocity of a point B of the slab as the sum of the velocity of a reference point A and of the velocity of B relative to a frame of reference translating with A (that is, moving with A but not rotating). The same approach is used later in Sec. 15.8 to express the acceleration of B in terms of the acceleration of A and of the acceleration of B relative to a frame translating with A.
An alternative method for the analysis of velocities in plane motion, based on the concept of instantaneous center of rotation, is given in Sec. 15.7; and still another method of analysis, based on the use of parametric expressions for the coordinates of a given point, is presented in Sec. 15.9.
The motion of a particle relative to a rotating frame of reference and the concept of Coriolis acceleration are discussed in Secs. 15.10 and 15.11, and the results obtained are applied to the analysis of the plane motion of mechanisms containing parts which slide on each other.
The remaining part of the chapter is devoted to the analysis of the three-dimensional motion of a rigid body, namely, the motion of a rigid body with a fixed point and the general motion of a rigid body. In Secs. 15.12 and 15.13, a fixed frame of reference or a frame of reference in translation will be used to carry out this analysis; in Secs. 15.14 and 15.15, the motion of the body relative to a rotating frame or to a frame in general motion will be considered, and the concept of Coriolis acceleration will again be used.
|