Gears are used to transmit torque, rotary motion, and power from one shaft to another. They
have a long history. In about 2600 B.C., the Chinese used primitive gearsets, most likely made
of wood, their teeth merely pegs inserted in wheels. In the 15th century A.D., Leonardo da
Vinci showed many gear arrangements in his drawings. Presently, a wide variety of gear
types have been developed that operate quietly and with very low friction losses. Smooth,
vibrationless action is secured by giving the proper geometric form to the outline of the teeth.
Compared to various other means of power transmission (e.g., belts and chains), gears
are the most rugged and durable. They have transmission efficiency as high as 98%. However,
gears are generally more costly than belts and chains. As we shall see, two modes of failure
affect gear teeth: fatigue fracture owing to fluctuating bending stress at the root of the tooth
and fatigue (wear) of the tooth surface. Both must be checked when designing the gears. The
shapes and sizes of the teeth are standardized by the American Gear Manufacturers Association
(AGMA). The methods of AGMA are widely employed in design and analysis of gearing.
Selection of the proper materials to obtain satisfactory strength, fatigue, and wear properties
is important. The AGMA approach requires extensive use of charts and graphs
accompanied by equations that facilitate application of computer-aided design. Gear design
strength and life rating equations have been computer modeled and programmed by most
gear suppliers. It is not necessary for designers to create their own computer programs [1-4].
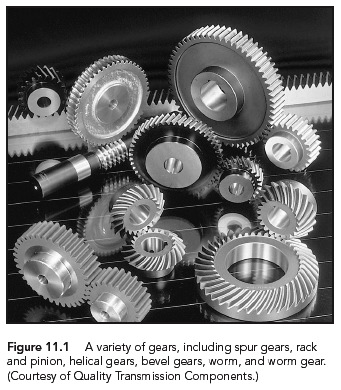
There are four principal types of gearing: spur, helical, bevel, and worm gears
(Figure 11.1). Note that spur and helical gears have teeth parallel and inclined to the axis of rotation, respectively. Bevel gears have teeth on conical surfaces. The geometry of a worm
is similar to that of a screw. Of all types, the spur gear is the simplest. Here, we introduce
the general gearing terminology, develop fundamental geometric relationships of the tooth
form, and deal mainly with spur gears. Areview of the nomenclature and kinematics is followed
by a detailed discussion of the stresses and a number of factors influencing gear design.
The basis of the AGMA method and its use are illustrated. Other gear types are dealt
with in the next chapter. For general information on gear types, gear drives, and gearboxes,
see the website at www.machinedesign.com. The site at www.powertransmission.com lists
websites for numerous manufacturers of gears and gear drives.